Forces
Forces are what can cause acceleration in objects. From Newton’s law of inertia, we know that any object in motion will remain in motion, and any object at rest will remain at rest. This comes from his 2nd law, ΣF = ma, or the net force is equal to mass times acceleration.
Forces are depicted as vectors, with different magnitudes showing different strengths of each force. A diagram showing net force on an object is called an FBD, or Free Body Diagram.
Equilibrium is when there is no acceleration. For something to be in equilibrium, the net force has to be 0. There can still be forces acting on an object, they just all have to cancel out with each other. Imagine a block sliding on frictionless ice; it would not be accelerating in any direction, it would just be moving with a constant velocity. There is also rest, which is where there is no velocity, but there can be acceleration. The moment that a ball stops at the peak of its arc the ball is at rest.
There are a few different types of forces that we need to know in mechanical physics. These are called contact forces. Some non-contact forces would be magnetism, electrostatics, and gravity, which is the only exception.
Gravity, the first force you should know, comes from any object with mass but is negligible until the object becomes heavy enough. Technically the screen you are reading this off of has a gravitational force, but it is nothing compared to the force of the Earth or Sun. Gravity pulls from and against the center of mass of each object. G (force of gravity, also sometimes shown as Fg) can be calculated using mass times g (acceleration due to gravity), which is called weight. So if you want to lose weight, just travel to the moon where g is less, and you will weigh about 1/6th of what you do here on Earth. When something is called weightless, that is because the g value is 0, not because it doesn’t have mass, as all matter must have mass.
The normal force, Fn or N, is the force of one object on another that is at rest. N usually counteracts gravity, creating an equal but opposite force coming from whatever the object is resting on. For example, a book resting on a table is still under the influence of gravity, but the normal force pushes it back up. The normal force cannot be the only force acting on an object.
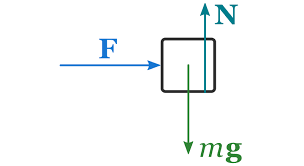
The applied force, depicted as F, shows any force applied to the object in question from any other person, object, etc. It shows any external forces that affect the object in question. This FBD shows an object with zero vertical acceleration, but positive, rightward horizontal acceleration that comes from the applied force.
The tension force comes from strings. Any string that is attached to something pulls on it with a force called tension, T. If an object is at rest on a table, a string could be attached which lowers the normal force, whilst still keeping the object in equilibrium. There can be multiple tension forces affecting an object, coming from multiple strings pulling the object in question.

Frictional forces, Ff, are forces that oppose motion when the motion is happening on a rough surface. The frictional force vector always points opposite to whichever direction motion is in but is 0 when the object is in free fall, as there is nothing in contact with the object. There are two different types of frictional forces, static and kinetic friction. Static friction is the friction that an object is required to overcome to move. Kinetic friction is the friction that the object feels when moving. Static friction must always be greater than kinetic friction. Cast iron is an example of something with extremely high static friction but low kinetic friction, meaning it would take much effort to get it moving, but once it is moving, it is relatively easy to slide. Friction can be calculated with the equation Ff = μ N, where μ is the coefficient of friction. μ is unitless, and depends only on the materials that are together. Sliding ice on ice has a kinetic μ value of 0.03, whereas sliding rubber on dry concrete has a kinetic μ value of 0.8. Interestingly enough, one of the lowest μ values in our lives is in human joints, which is close to 0.003.

The spring force comes from the stretch or compression of a string, and it always returns the spring back to its original position. It is larger the further it is from equilibrium, and depends on the spring constant of an object, which is basically the strength and durability of the spring.
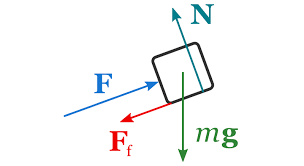
However, not everything is perfectly horizontal. When the object is on an inclined plane, the math becomes more difficult. Gravity will always point downwards, but, when the object is on an inclined plane, N points perpendicular to the surface. These two forces will require a third to remain in equilibrium, as the normal force has both vertical and horizontal components of the vector. When looking at these situations, there are parallel and perpendicular planes added on to the x and y planes. Gravity is in the y plane, friction would be in the parallel plane, and normal would be in the perpendicular plane.